Emergent Qualities of Robotic Architecture Fabrication
Interfaces for a Architectural Robot Craftsmanship
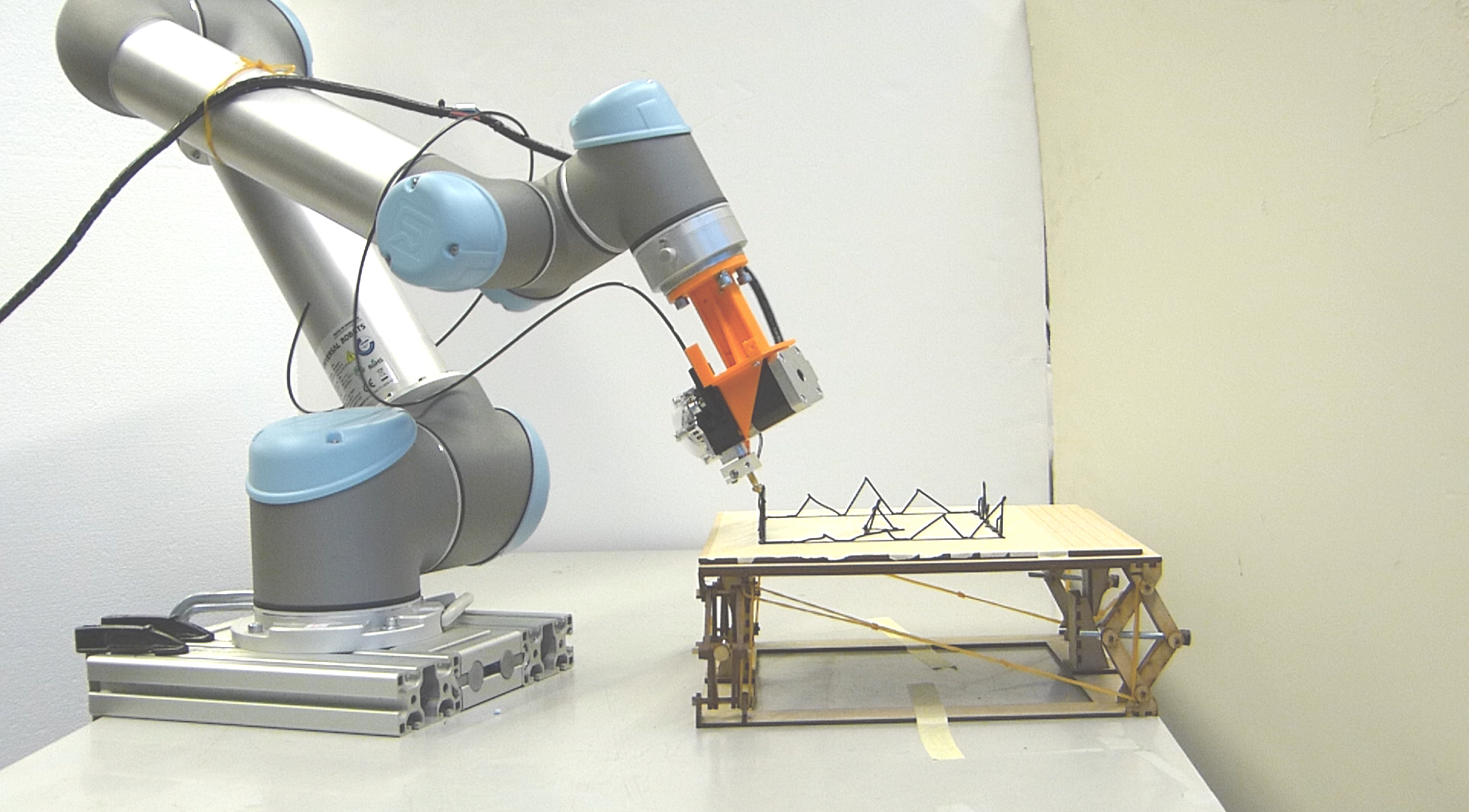
Robotic technology is already sporadically deployed in the building industry, yet mostly in the form of highly specialised and expensive automated machinery that support the monotonous execution of predefined and repetitive tasks. By democratising the practical understanding of robotic actuation, architects are now empowered to intervene and alter the fabrication or assembly process of materials themselves, making the construction of uniquely customised designs finally feasible. This discipline, commonly coined as ‘robotic architecture’, demonstrates the impressive and economically feasible capabilities of robotic fabrication in an architectural context.
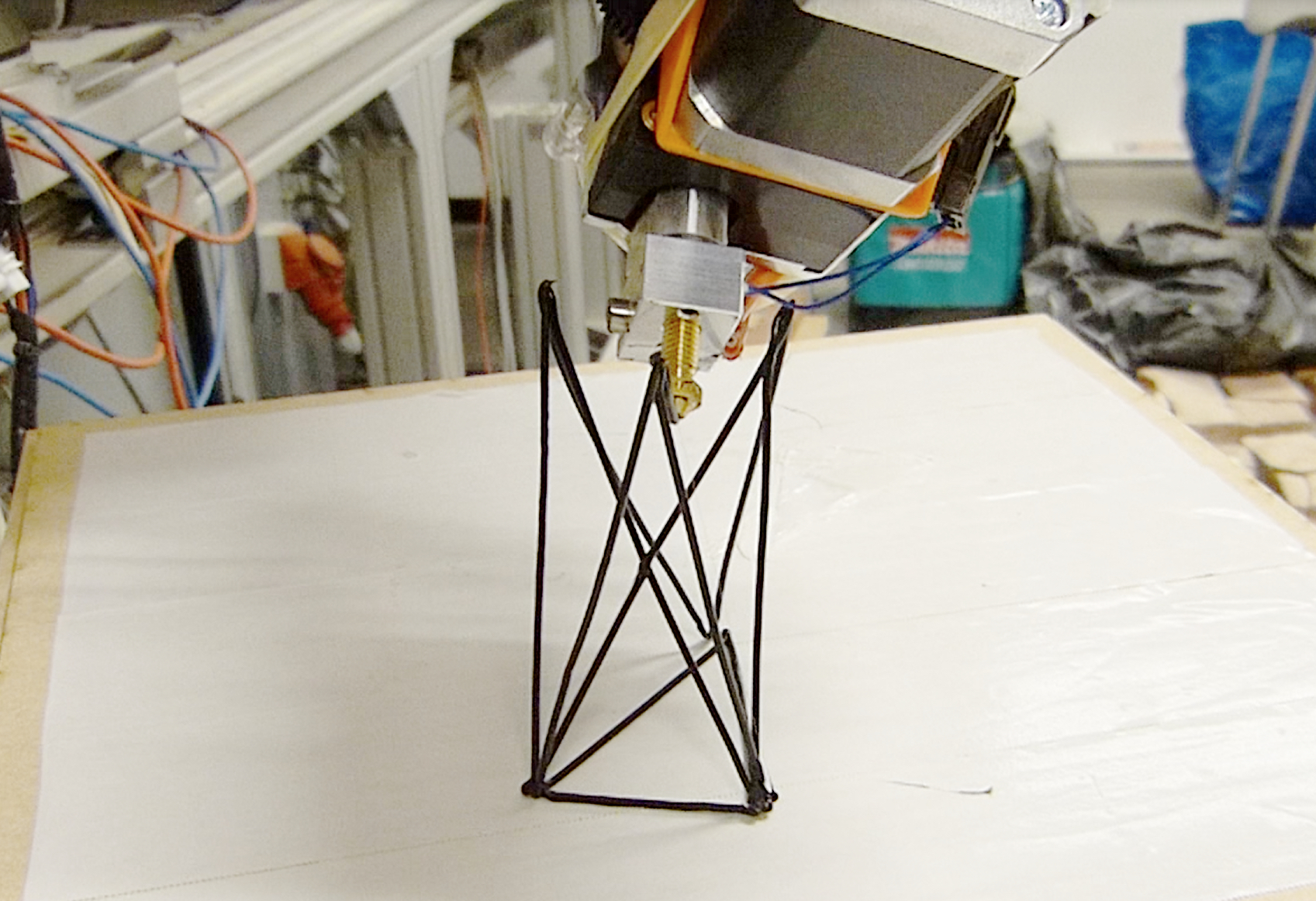
Yet new kinds of interfaces are required to exploit the intrinsic capabilities of architectural robotic fabrication, and more specifically in how these could leverage designerly forms of knowing and thinking that exploit the physical presence, life-size scale and material characteristics of a fabricated prototype. The research focuses on developing new kinds of human-robot interfaces that will allow for the designerly and informed exploration of material form, in that they facilitate the iterative design and alteration of physical prototypes of architectural elements via robotic actuation.
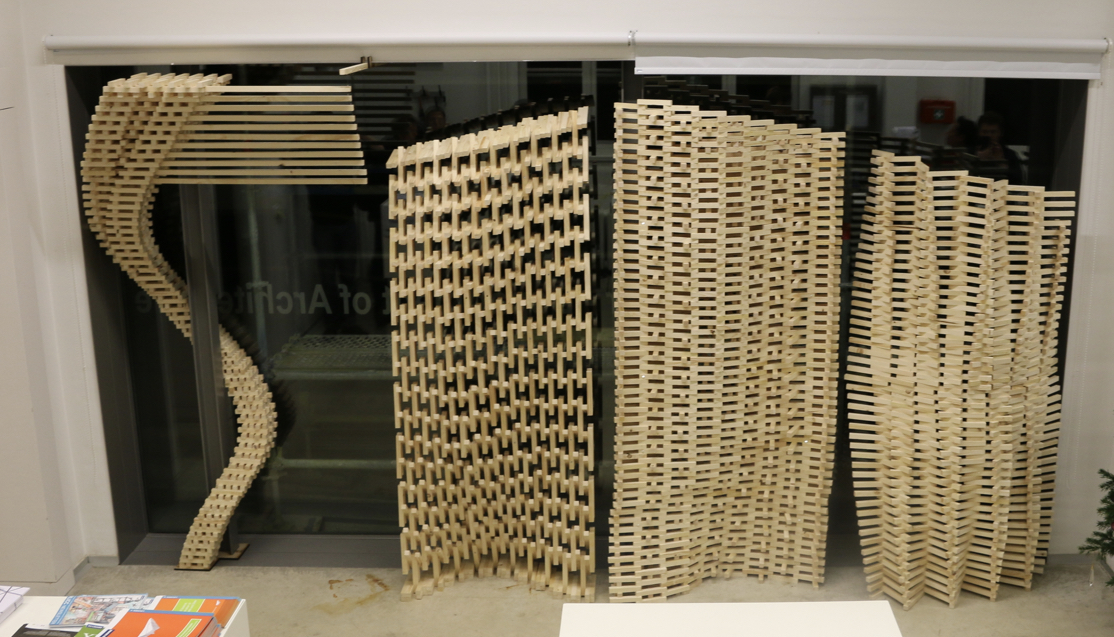
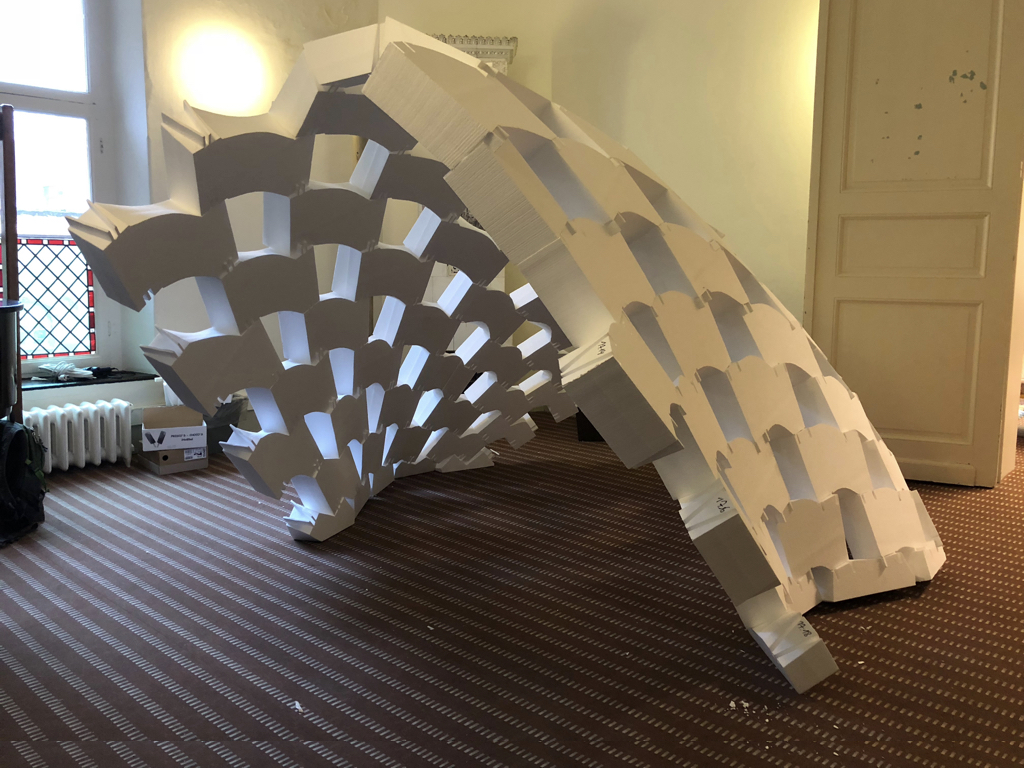
We propose that fabricating architecture in more interactive and embodied ways offers unique design opportunities, such as in exploring the material, structural or construction constraints that only emerge during the fabrication process itself, or in revealing design languages that exploit computational modelling as well as handcrafting qualities.